

1. 点群とは何か?
点群(Point Cloud)とは、その名の通り点が集まったデータのことです。
3Dスキャナーやドローンなどで計測した対象物の表面を、膨大な数の点として表現した3次元データです。
一つひとつの点は、位置情報(X, Y, Z)色情報(R, G, B)を持っています。これらが数百万〜数億個集まることで、まるで写真や立体模型のように物体の形を再現します。
2. 点群データの作成方法
点群を生成するための主な手法は2つあります。
2.1. レーザースキャニング(LiDAR)
地上型3Dスキャナーやドローンに搭載されたレーザーセンサー(LiDAR)を使用します。レーザーを照射し、反射して戻ってくるまでの時間を測定して距離を算出します。
- メリット: 精度が非常に高く、暗所でも計測可能。
2.2. フォトグラメトリ(写真測量)
異なる角度から撮影した大量のデジタル写真から、共通する特徴点を抽出して3D化する技術です。
- メリット: 一般的なカメラやドローンで実施でき、テクスチャ(見た目)が美しい。
3. 点群のセグメンテーション
スキャンした直後の点群データは、ただの座標を持った点の集合に過ぎません。コンピュータにとっては、それが壁なのか椅子なのか、判別できない状態です。
そこで重要になるのがセグメンテーションです。
3.1. セグメンテーションの役割
セグメンテーションとは、膨大な点群の中から、同じ属性を持つグループごとにラベルを貼り付けていく作業のことです。
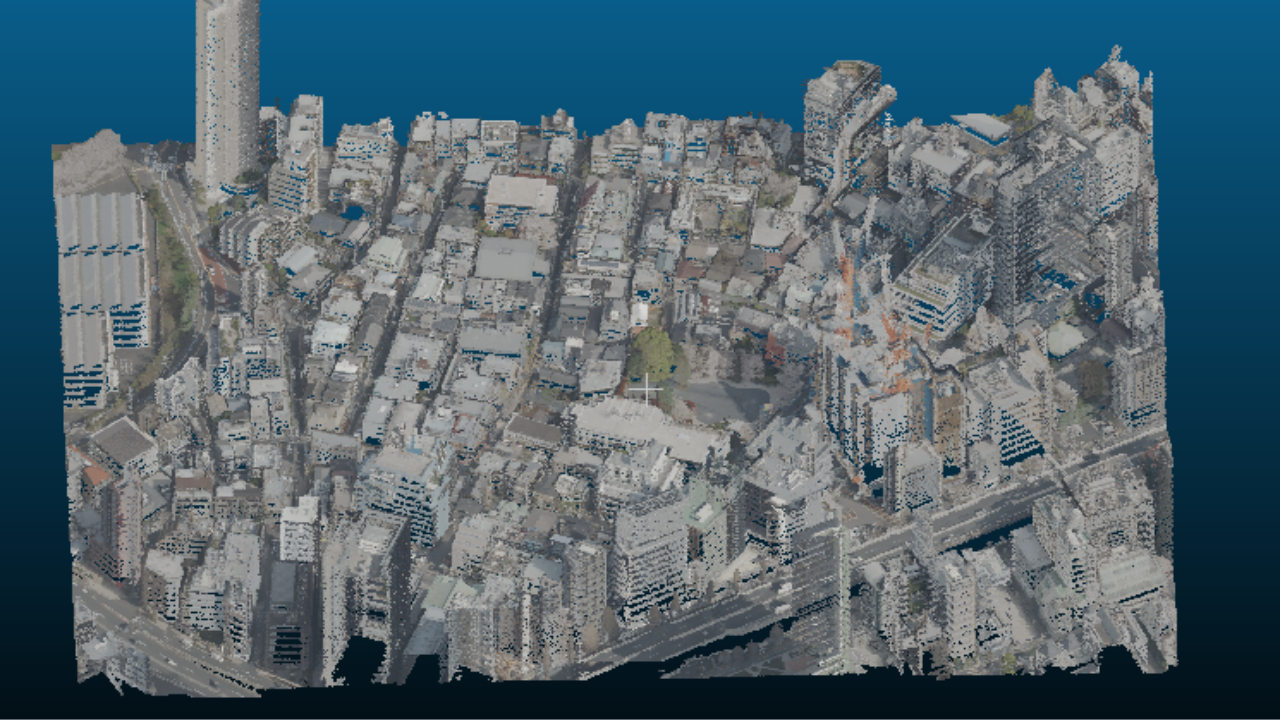
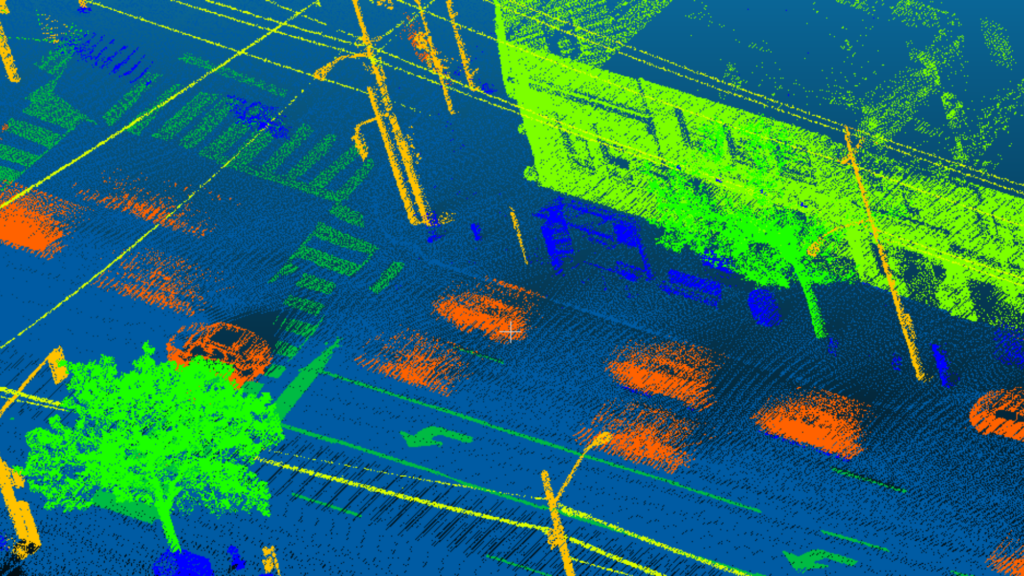
以下のように町を色分けができます。
セグメンテーション前:
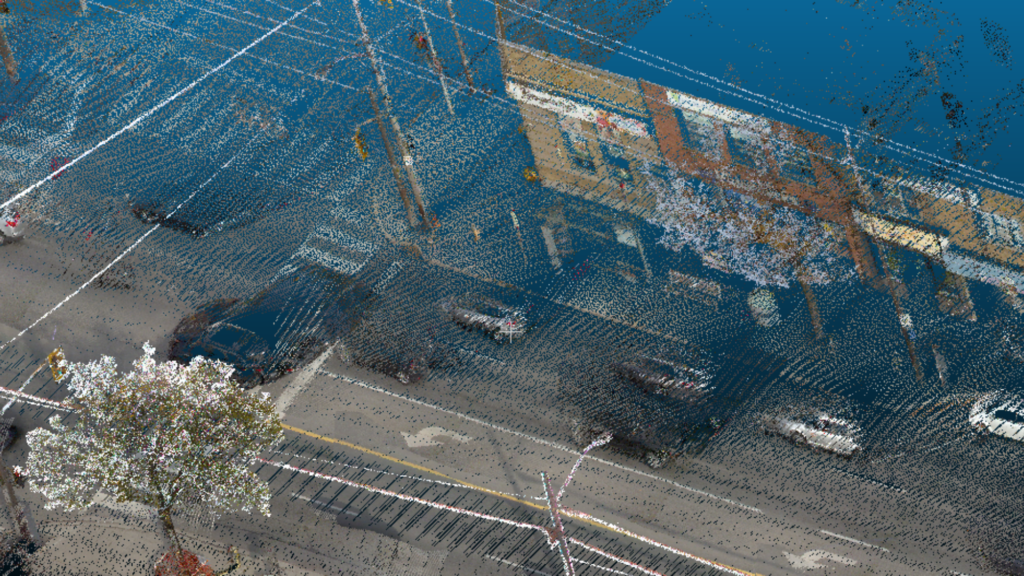
セグメンテーション後:
3.2. セグメンテーションの手法
点群のセグメンテーションには、以下の四つの手法があります。
1. ポイントベース手法(Point-based)
点群の座標データを加工せず、直接入力として扱うアプローチです。座標情報の精度を落とさずに処理できるため、精密な物体の識別に向いています。
- PointNet: 2017年に発表された先駆的なモデルであり、点群が持つ順序不等性を対称関数を用いることで解決しました。
- PointNet++: PointNetに階層構造を導入し、局所的な幾何学特徴を捉える能力が向上しました。
2. トランスフォーマーベース手法(Transformer-based)
LLMで使われる手法を点群に応用し、点同士の相関関係を広範囲にわたって機械学習する最新のアプローチです。
- Point Transformer: 点群間の動的な重み付けを行うことで、複雑な環境下でも極めて高いセグメンテーション精度を記録しています。
3. ボクセルベース手法(Voxel-based)
3D空間を格子状の立方体に区切り、3D畳み込み演算を適用するアプローチです。広範囲なスキャンデータを高速に処理できるため、自動運転や屋外ロボットの地図生成において主流の技術となっています。
- VoxelNet / SparseConv: 空間の疎性を活かした「スパース畳み込み」により、計算コストを大幅に抑えることができます。
4. グラフベース手法(Graph-based)
点同士の近傍関係をグラフ(点と線)として捉え、幾何学的な構造を学習するアプローチです。
- DGCNN (Dynamic Graph CNN): 各層でグラフ構造を動的に更新することで、物体のトポロジー的な特徴を捉えます。
複雑な形状が入り混じる環境でも、物体の接続関係を正確に把握できる強みがあります。
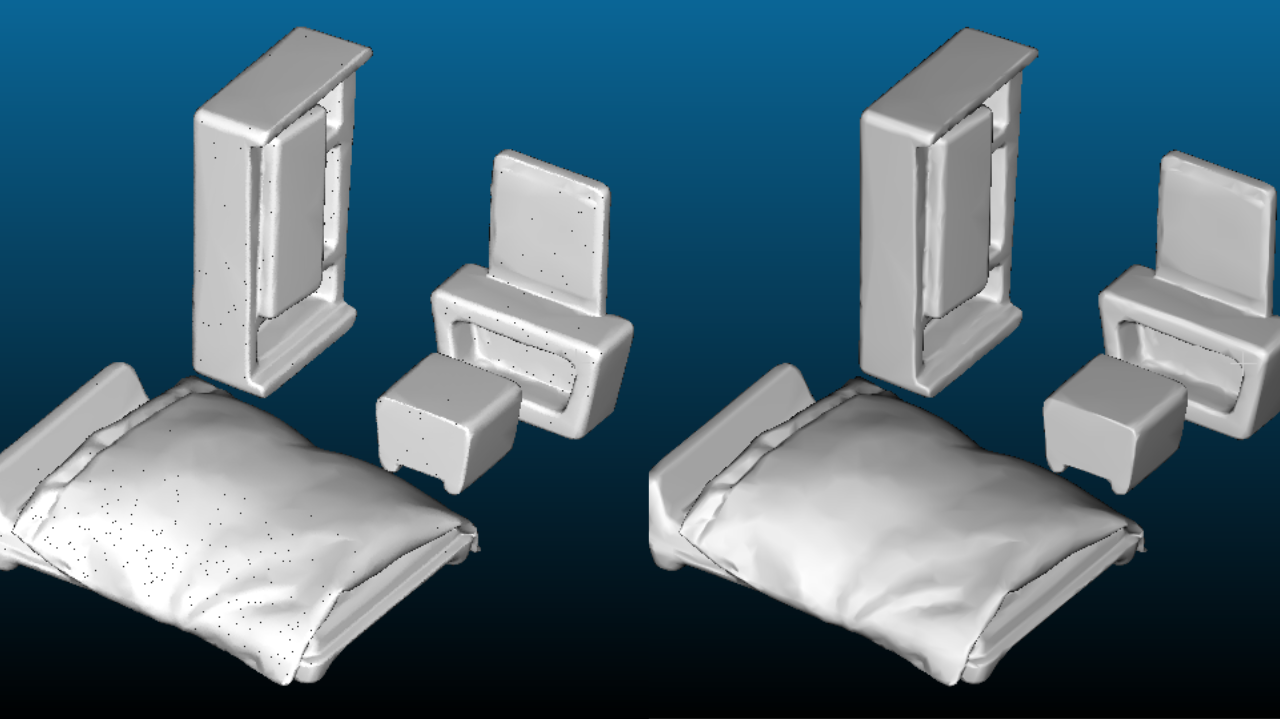
4. 点群のサンプリング
4.1. 点群のサンプリングとは?
3DスキャナーやLiDARで取得した「生の点群データ」は、数百万から数億点という膨大な情報量を含んでいます。これをそのまま解析やAIの学習に使うと、メモリ不足に陥ったり、処理に膨大な時間がかかったりしてしまいます。
点群のサンプリングとは、データの全体的な形状や重要な特徴(エッジや輪郭など)を維持しながら、点の数を適切な量に減らす(ダウンサンプリングする)工程のことです。これは単なるデータ削減ではなく、計算効率を最大化し、ノイズを除去してAIが学習しやすい形に整えるための重要な「前処理」です。
4.2. 代表的な3つの手法
点群処理の目的や要求される精度に応じて、主に以下の3つの手法が使い分けられます。
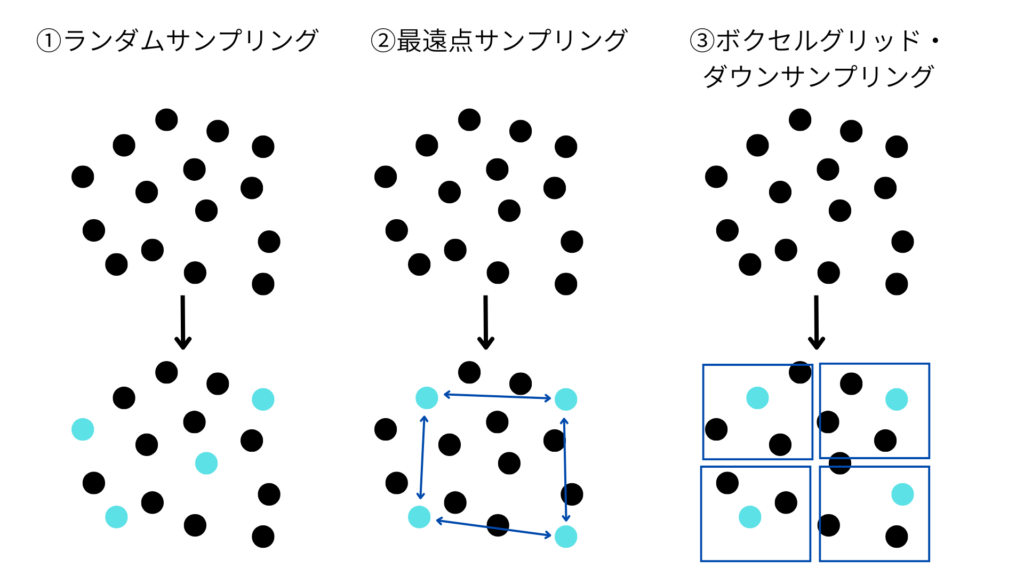
1. ランダムサンプリング(Random Sampling)
全データの中から、無作為(ランダム)に点を抽出する手法です。
- 特徴: 計算コストが最も低く、高速に処理できます。
- 欠点: 点の密度に偏りがあるデータの場合、重要な形状(角や細部)の情報が抜け落ちてしまうリスクがあります。
2. 最遠点サンプリング(Farthest Point Sampling / FPS)
すでに選択された点から、空間的に最も遠い位置にある点を選んでいく手法です。
- 特徴: 空間全体を非常に均一にカバーできるため、物体の全体像を捉える能力に優れています。
- 活用例: PointNet++ や Point Transformer など、ディープラーニングモデルの多くで標準的に採用されています。
3. ボクセルグリッド・ダウンサンプリング(Voxel Grid Downsampling)
3D空間を小さな立方体の格子で区切り、各格子内にある複数の点を、その重心などの1点に集約する手法です。
- 特徴: データ密度を均一化し、センサー由来のノイズを滑らかにする効果があります。
- 活用例: 自動運転のリアルタイム環境認識や、Open3D などのライブラリを用いた広域スキャンデータの軽量化によく使われます。
5. 点群の活用方法
点群には、以下のような活用方法があります。
1. 物体形状の計測
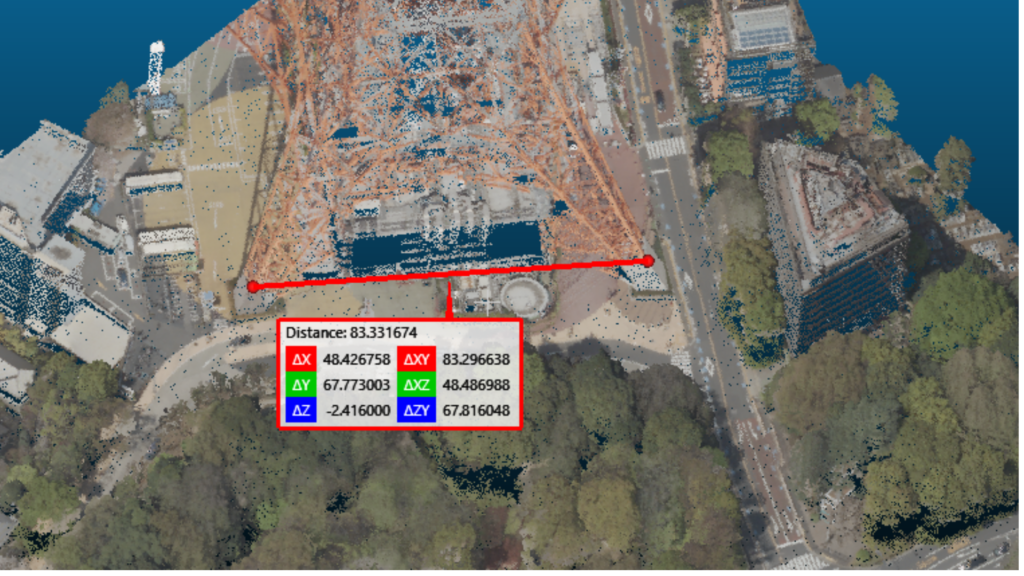
点群を用いる最大のメリットは、現実世界の正確な大きさをデジタル上で測れることです。
物体を点群にすることで、2点間の距離だけでなく、複雑な形状の物体の表面積などをデジタル上で算出できます。
2. デジタルツインへの再現
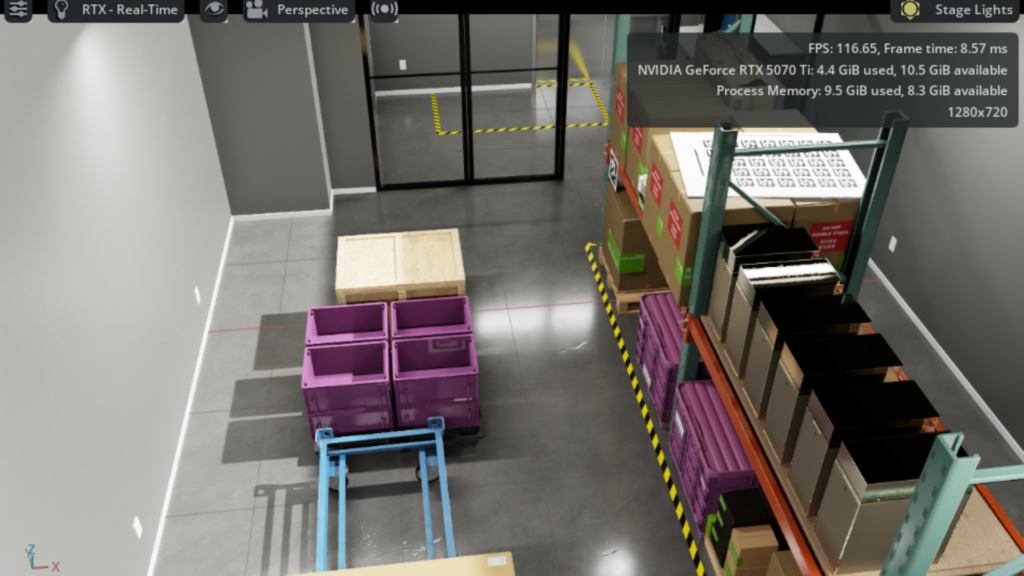
点群をメッシュ化することで、現実世界をそのままデジタルツインに再現できます。
NVIDIA Isaac Simなどのプラットフォームに点群を取り込み、物理演算を付与することで、フィジカルaiを現実世界で動かすための学習を仮想空間で行えます。
3. AIによる環境理解
ロボットや自動運転車が「今、自分の周りに何があるか」をリアルタイムで判断するために使われます。
例えば、自動運転車が走行中に得られる点群から歩行者と車と信号を適切に識別し、安全に自律走行することができます。
5. まとめ
点群データは、現実の世界をデジタル空間でそのまま扱うための架け橋となる技術です。以前はデータ量の重さが課題でしたが、PC性能の向上やクラウド技術の発展により、現在では様々な業界で活用されています。