

1. 点群とメッシュとは?
3Dデータを扱う上で必ず登場する点群とメッシュは、どちらも立体を表現するためのデータ形式ですが、その性質は大きく異なります。
一言でいうなら、点群はバラバラの点の集合であり、メッシュはそれらをつないだ面の集合です。
1.1. 点群(Point Cloud)の特徴
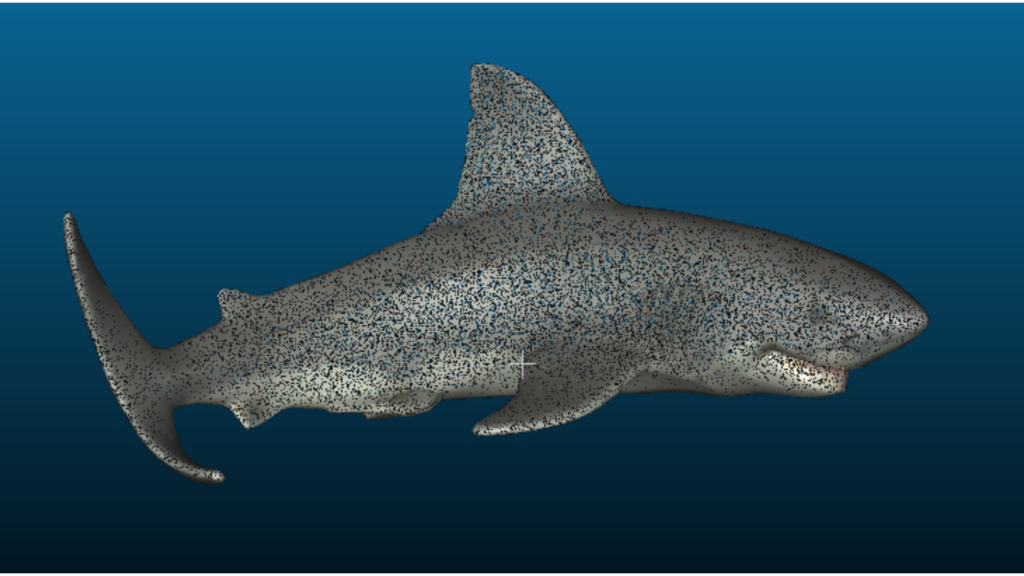
点群は、LiDARスキャナーやドローンなどで計測することで得れる生のデータです。
- 構造: 空間上の座標(X, Y, Z)を持つ点の集まり
- メリット: 計測した現実の形状を極めて忠実に再現できる
- デメリット: 物体の表面を認識しづらく、光を反射させたり物理的な衝突判定が行えない
1.2. メッシュ(Mesh)の特徴
点群をもとに、隣り合う点同士を線で結び、三角形の面を張った状態のことです。
- 構造: 頂点(Vertex)、辺(Edge)、面(Face)で構成される多面体。
- メリット: 表面が定義されているため、色や質感をきれいに表現でき、物理シミュレーションも行える
- デメリット: 生成する過程で計算コストがかかり、元の点群の形状が失われる場合もある
2. 変換が必要な理由

例えば、フィジカルAIを搭載したロボットが「机の上にあるコップを掴む」という動作を考えてみましょう。 センサーで捉えただけの点群の状態では、ロボットにとっては連続性を持たず、物体の形状を把握できません。これをメッシュに変換して初めて、ロボットは表面の構造を理解し、安全にコップを掴むことが可能になります。
つまり、点群をメッシュに変える工程は、AIが現実の物体をデジタルで解釈可能な情報に変換するために極めて重要なステップなのです。
3. 点群をメッシュに変える方法
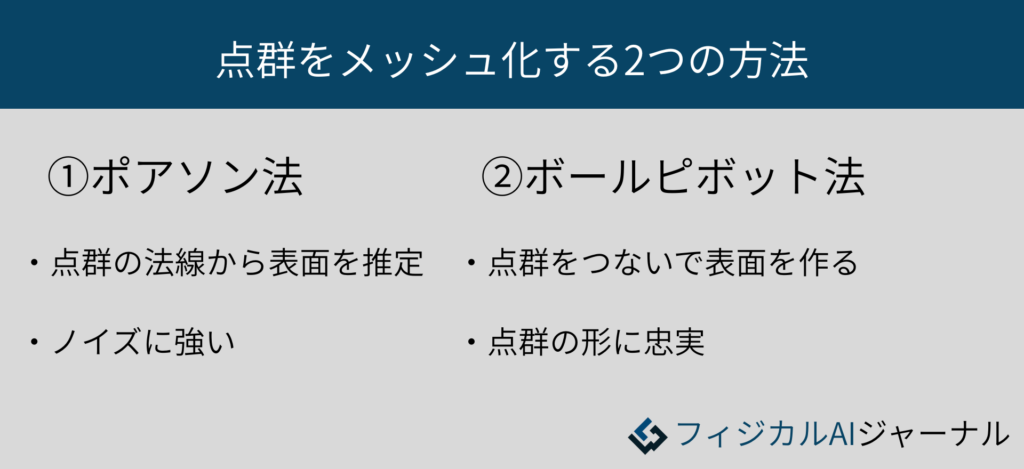
点群データをメッシュ化する際、用途やデータの状態に合わせて最適なアルゴリズムを選ぶことが重要です。ここでは、現在最も主流となっている「ポアソン法」と「ボールピボット法」の2つを詳しく紹介します。
3.1. ポアソン法とボールピボット法
手法によって、穴をどう埋めるかと、どこまで忠実に再現するかが違います。
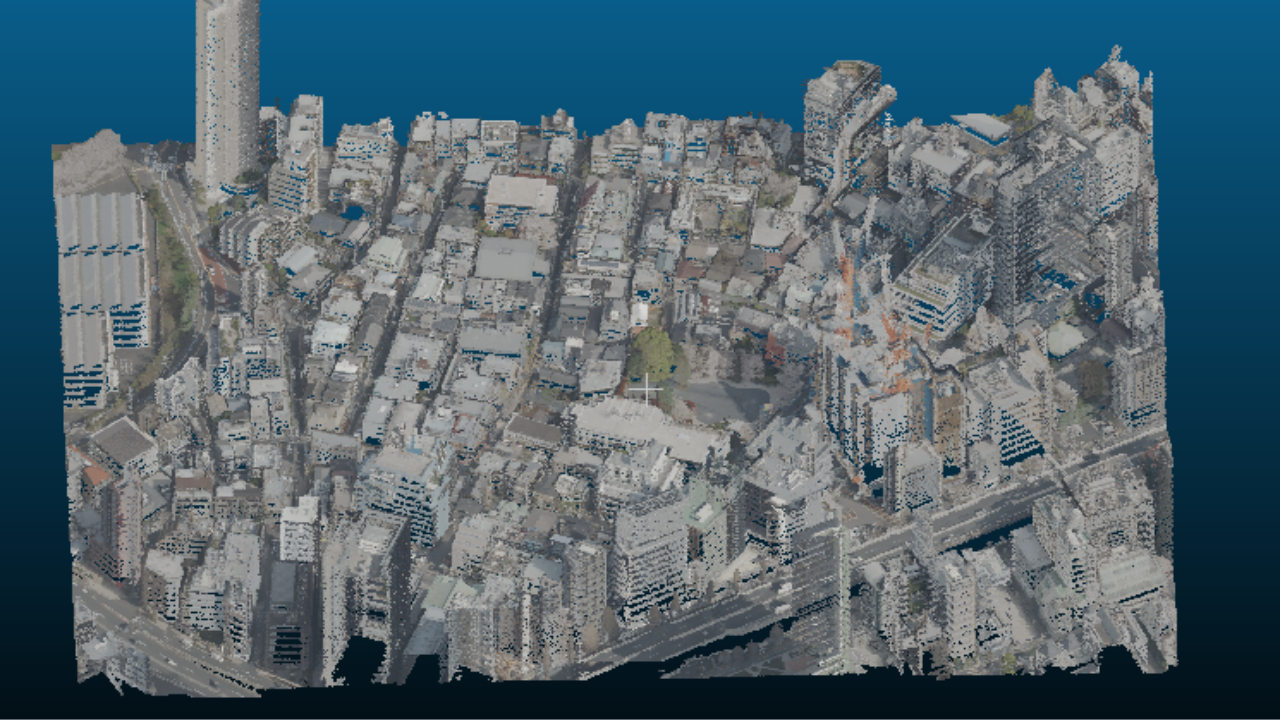
- ポアソン法(Poisson Surface Reconstruction)点群全体を一つの大きな電磁場のように捉え、統計的に滑らかな表面を推定してメッシュを張る手法です。多少のノイズやデータの欠損があっても、AIが補完するようにきれいに穴を埋めてくれるのが最大の特徴です。
- ボールピボット法(Ball Pivoting Algorithm)仮想的なボールを点群の上で転がし、ボールが触れた3つの点をつないで三角形の面を作っていく手法です。ポアソン法とは異なり、計測された点の位置を非常に忠実に再現します。
3.2. 手法の使い分けについて
ざっくりとした使い分けのイメージは以下の通りです。
| 特徴 | ポアソン法 | ボールピボット法 |
| 仕上がり | 滑らか、穴が埋まりやすい | 忠実、穴はそのまま残る |
| ノイズ耐性 | 高い(ノイズを吸収する) | 低い(ノイズもそのまま形になる) |
| 主な用途 | 建築・環境スキャン | リバースエンジニアリング |
それぞれのアルゴリズムの具体的な仕組みや、さらに詳しいメリット・デメリットについては、続く第4章・第5章で深掘りしていきます。
4. ポアソン法(Poisson Surface Reconstruction)とは?
ポアソン法(Poisson Surface Reconstruction)とは、数学の「ポアソン方程式」を応用して、点群から最適と思われる表面(サーフェス)を逆算する手法です。
この手法の最大の特徴は、個々の点を単純につなぐのではなく、点群全体を一つの大きな「場(スカラー場)」として扱い、「どこが物体の内側で、どこが外側か」を統計的に導き出す点にあります。
4.1. ポアソン法の仕組み
ポアソン法によってメッシュが生成される流れは以下の通りです。
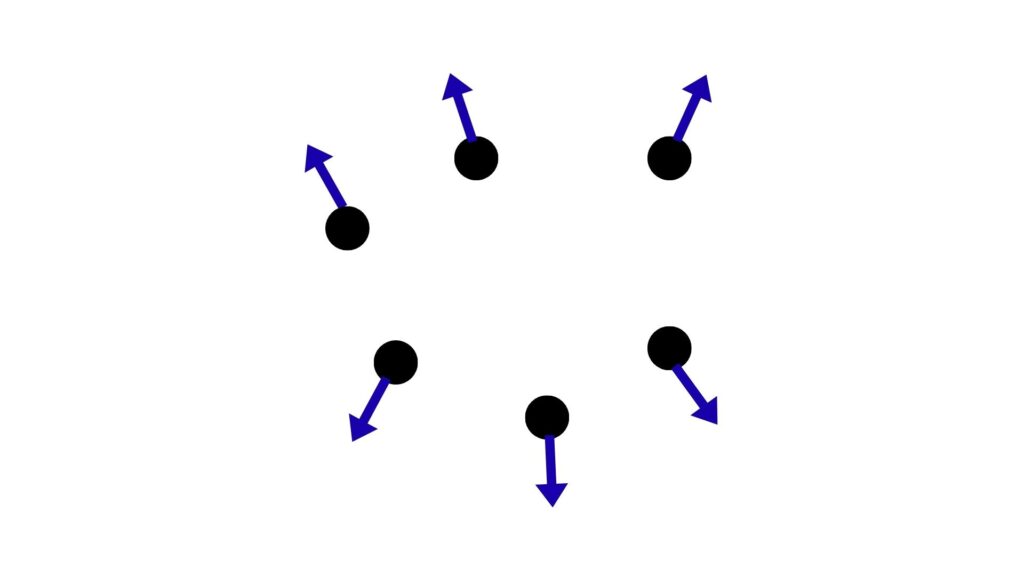
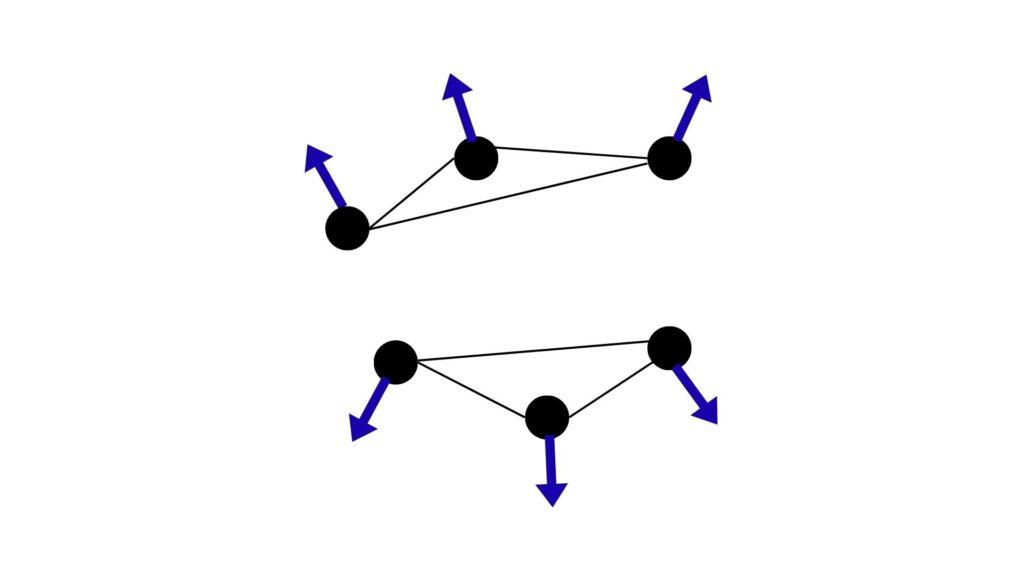
①各点がどちらを向いているかを法線として計算する
②隣り合う法線の向きがどれほど近しいかを計算する
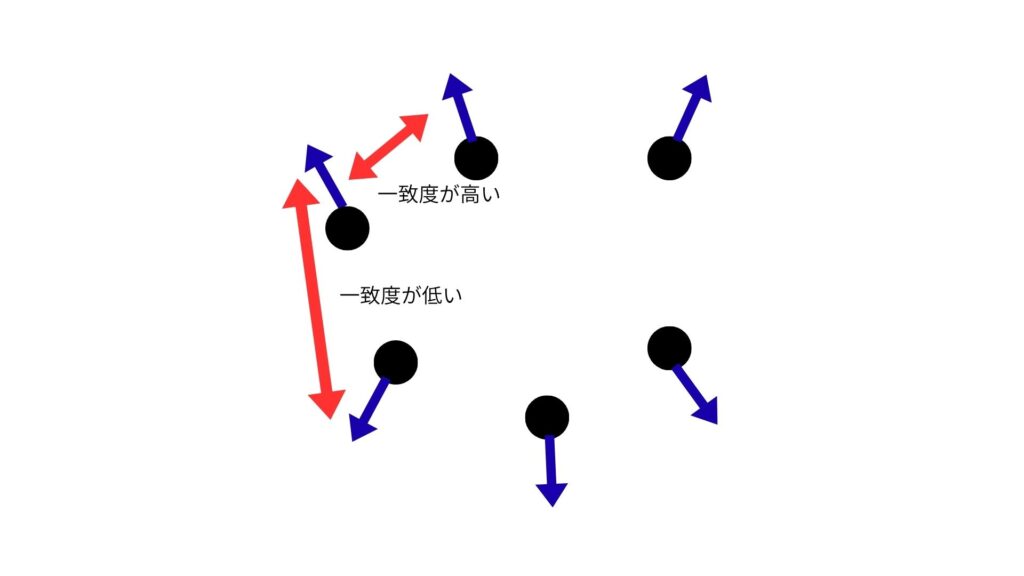
③法線の向きが近しい点同士でメッシュを生成する
4.2. ポアソン法のメリット・デメリット
メリット
- ノイズに強い: 点が多少バラついていても、全体の流れから面を推定するため、非常に滑らかな仕上がりになります
- 穴埋め機能がある: スキャンしきれなかった死角などのデータの欠損を自動的に補完し、閉じたメッシュを作るのが得意です
- 処理速度が早い: 八分木(Octree)というデータ構造を用いるため、数百万点を超えるような巨大なデータセットでも比較的高速に処理できます
デメリット
- エッジが丸まりやすい: 統計的に滑らかにする性質上、機械の角のような部分が少し丸くなってしまう傾向があります
- 法線データが必須: 事前に各点の向き(法線)が正しく計算されていないと、メッシュが崩れたり裏返ったりしてしまいます
- 架空の面ができる: 本来は穴が開いている場所まで無理やり埋めてしまうことがあります
4. ボールピボット法(Ball Pivoting Algorithm)とは?
ポアソン法が統計的に滑らかな面を作る手法であるのに対し、ボールピボット法(Ball Pivoting Algorithm)は今ある点の間を物理的に埋めていく手法です。
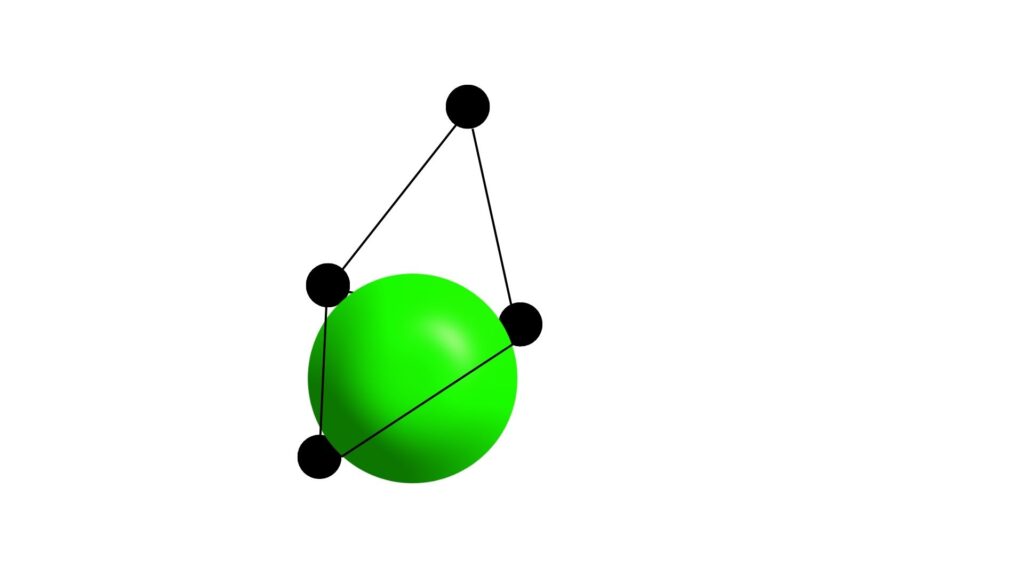
その名の通り、仮想的なボールを点群の上で転がし、ボールが3つの点に同時に触れた瞬間、そこに三角形の面を張っていくというユニークな仕組みを持っています。
4.1. ボールピボット法の仕組み
ボールピボット法によってメッシュが生成される流れは以下の通りです。
①適切な半径(r)を持つ仮想のボールを、2つの点に触れた状態を軸にして、隣の点に当たるまでと転がす
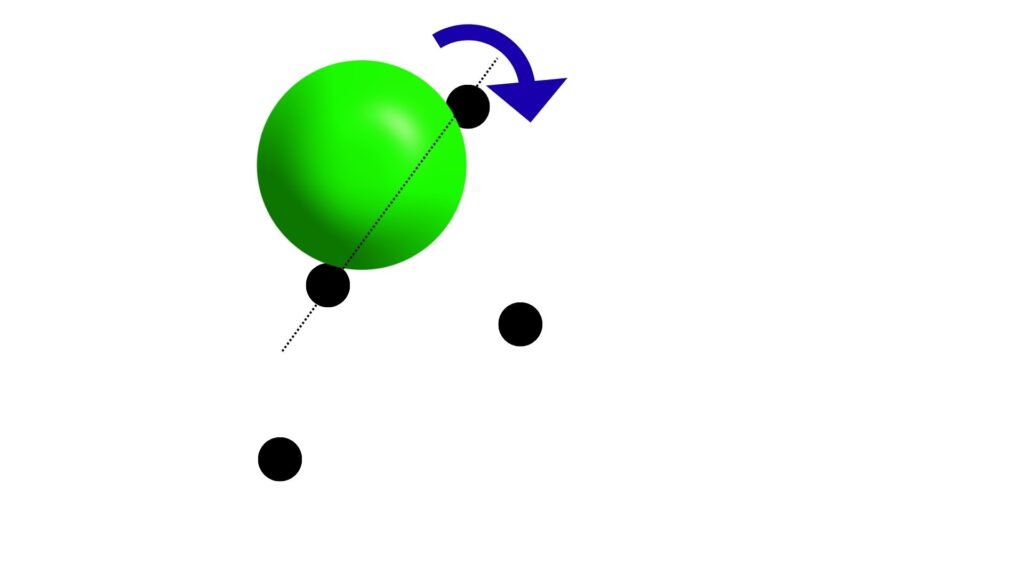
②新しい点に触れ、合計3つの点にボールが接したとき、その3点を結ぶ三角形の面を生成する
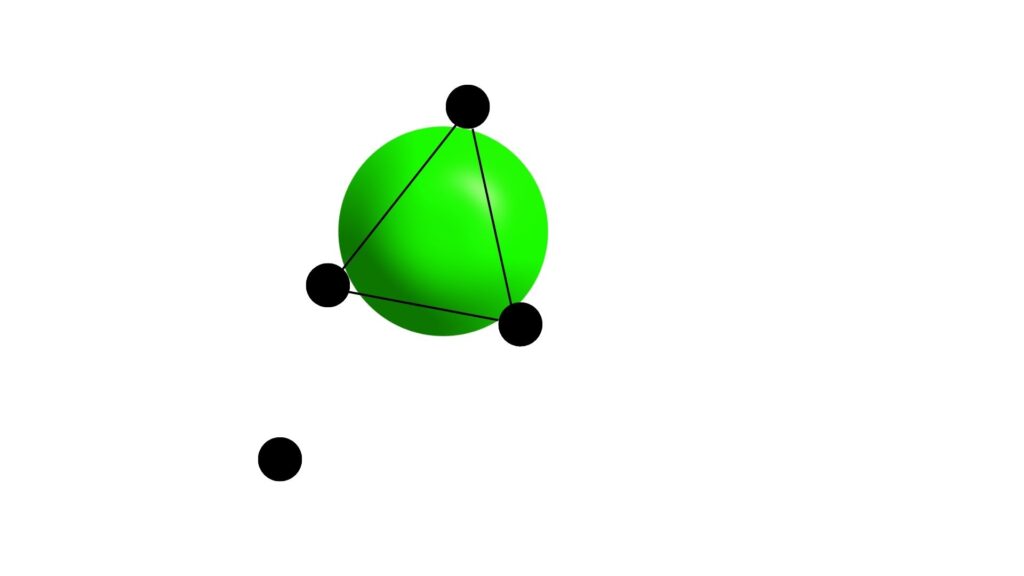
③新しい三角形の辺を軸として、球を転がし、新たなメッシュを作る
これを繰り返してメッシュを作っていきます。
4.2. ボールピボット法のメリット・デメリット
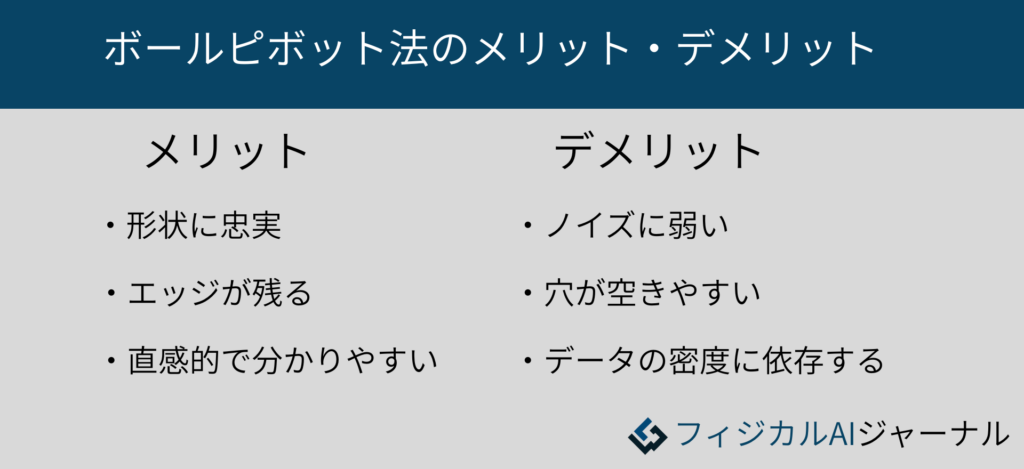
メリット
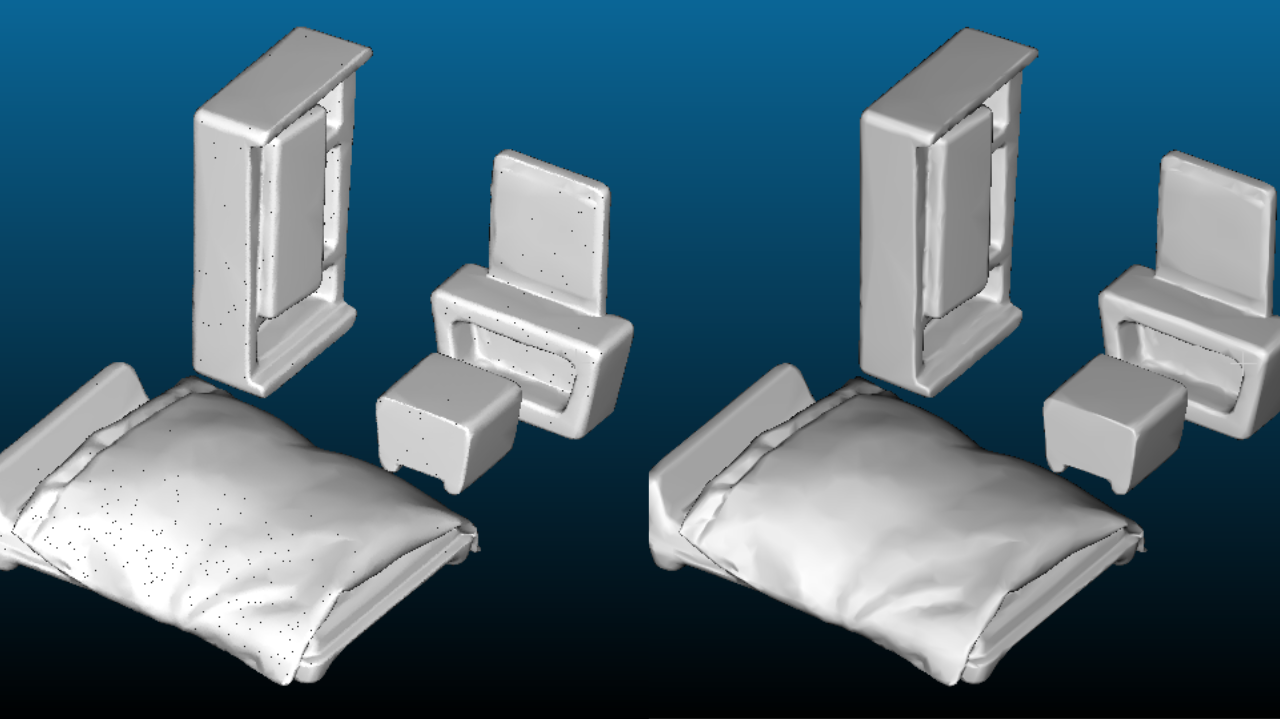
- 形状に忠実: 実際に計測された点だけを結ぶため、ポアソン法のように勝手に角が丸まったり、形が変わったりすることがほとんどありません
- エッジが残る: 角度が急激に変わる部分でも、点さえ存在すれば正確に面を張ることができます
- 直感的で分かりやすい: ボールが通った場所に面ができるという単純なルールのため、結果の予測がつきやすいです
デメリット
- ノイズに弱い: ノイズの点があると、そこにもボールが引っかかってしまい、不自然なメッシュができてしまいます
- 穴が空きやすい: 点の間隔がボールの半径よりも広い場所では、ボールがストップしてしまい、メッシュが張られずに穴が残ります
- データの密度に依存する: 点群の密度がバラバラだと、ボールのサイズ設定が難しくなります
5. 点群をメッシュ化するツール
実際に点群をメッシュにできる代表的なツールを紹介します。
・MeshLab(オープンソース)
メニューの「Filters」から、今回紹介した「Poisson Reconstruction」や「Ball Pivoting」をすぐに実行できます。
・CloudCompare(オープンソース)
主に測量やLiDARデータの扱いに長けたツールです。巨大な点群を間引いたり、ノイズを除去したりする前処理に非常に強力です。
Open3D(Pythonライブラリ)
プログラミングで自動化したい場合に最適です。数行のコードで点群の読み込みからメッシュ生成まで完結できるため、フィジカルAIの開発現場でも重宝されています。
6. まとめ:フィジカルAIにおける3Dデータの役割
衝突判定、摩擦計算、物体把持といった物理演算を行うためには、バラバラの点ではなく、連続的な面としての情報が不可欠です。現実の観測データをシミュレーション可能な計算資源へと昇華させるこの技術は、フィジカルAIの精度を左右する基盤となります。