


AIが物理世界で活動するフィジカルAIの時代において、学習環境として欠かせないのがNVIDIA Omniverseです。ただの3D制作ツールではなく、現実世界と同様の挙動をデジタル上で再現するこのOSについて解説します。
1. NVIDIA Omniverseとは?
Omniverseの特徴は、特定のソフトウェアを指すのではなく、3Dワークフローを統合するOS(基盤)であるという点です。
これまでの3D開発は、ソフトごとにファイル形式が異なり、データの移行や共同作業に多大なコストがかかっていました。Omniverseはこれらを繋ぎ、複数のユーザーが異なる場所から、異なるソフトを使って同時に一つの3D空間を編集できる環境を提供します。
2. NVIDIA Omniverseのエンジン
プラットフォームの上で動くのが、NVIDIAが培ってきたエンジンです。これらが共通化されているため、どのアプリを使っても同じ物理的な正しさが保証されます。
2.1. OpenUSD (Universal Scene Description)
OpenUSDは、元々Pixarがアニメーション制作のために開発した3Dデータの共通規格です。ウェブにおけるHTMLのように、異なるソフトで作られたデータをつなぎ合わせる役割を果たします。
これまでの3D開発では、CADデータやCGモデル、アニメーションなどを統合する際にデータの破損や変換の手間が大きな壁となっていましたが、OpenUSDを採用することで、設計データ(CAD)や演出用データを一つの空間に矛盾なく統合し、複数のクリエイターやエンジニアがリアルタイムで共同編集することが可能になります。
2.2. RTX Rendering
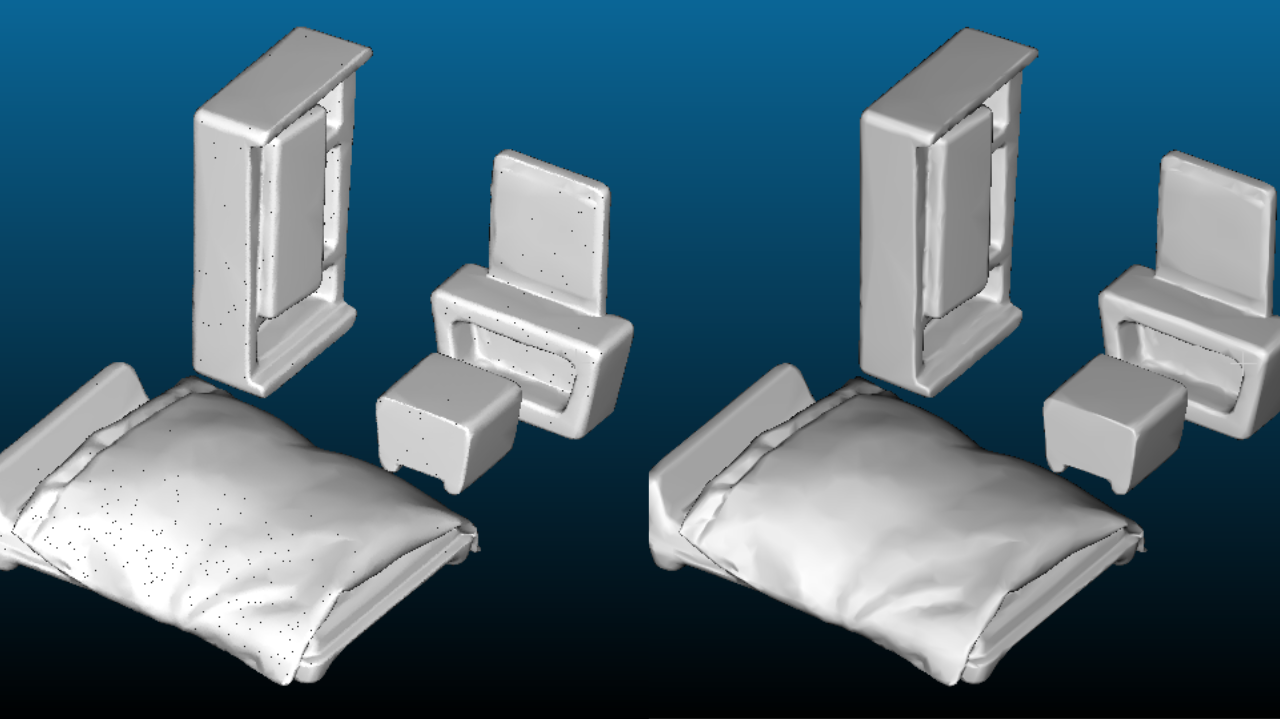
RTX Renderingは、光の反射や屈折を物理法則に基づいてリアルタイムで計算するレイトレーシング技術によって、単に綺麗な絵を作るためだけではなく、影の落ち方や金属の反射、素材の質感などを現実と一致させることができます。
実写と見紛うほどのフォトリアルな環境で学習させることで、仮想空間で学んだ知能をそのまま現実のカメラ映像に適応させることができます。
2.3. PhysX
PhysXは、重力、摩擦、空気抵抗、物体の衝突などをシミュレートする物理演算エンジンです。
ロボットの学習において、現実と同じように物が動くことは絶対条件です。例えば、ロボットがカップを掴む際の摩擦力や、重い荷物を持ち上げた時の慣性の影響が正しく計算されないと、AIを現実世界に適用することができません。
PhysXを用いることで、AIは仮想空間にいながらにして、地球上の物理法則を踏まえた学習を行うことができます。
3. NVIDIA Omniverseのアプリケーション
2で解説した基盤となる共通エンジン(RTX、PhysX、OpenUSD)の能力を統合・活用することで特定の産業目的や業務タスクに特化したアプリケーションが開発されています。
| 特徴 | USD Composer | Isaac Sim / Isaac Lab | 自作アプリ (Omniverse Kit) |
| 主な役割 | 空間の構築・編集 | ロボットの訓練・検証 | 専用ツールの開発 |
| 開発の焦点 | シーン構成、照明、質感 | 動作制御、AI学習、センサー | 独自のUI、業務特化機能 |
| 得意なタスク | 工場全体のレイアウト作成、フォトリアルなレンダリング | ロボットアームの操作学習、LiDAR/カメラの挙動再現 | 自社専用の監視システム、AR連携ツールの構築 |
3.1. Isaac Sim/Isaac Lab
Isaac Simは、ロボットの設計、シミュレーション、そしてAI学習に特化したアプリケーションです。 単にロボットを配置するだけでなく、LiDARやカメラといったセンサーの挙動まで物理的に正確に再現できるため、デジタルツイン上での操作検証に欠かせない存在となっています。
さらに、このIsaac Sim上で動くIsaac Labという拡張フレームワークを組み合わせることで、強化学習や模倣学習を劇的に効率化できます。Isaac Labは、数千台のロボットを仮想空間内で同時に並列稼働させ、現実世界では数年かかるような経験をわずか数時間でAIに積ませることができます。
3.2. USD Composer
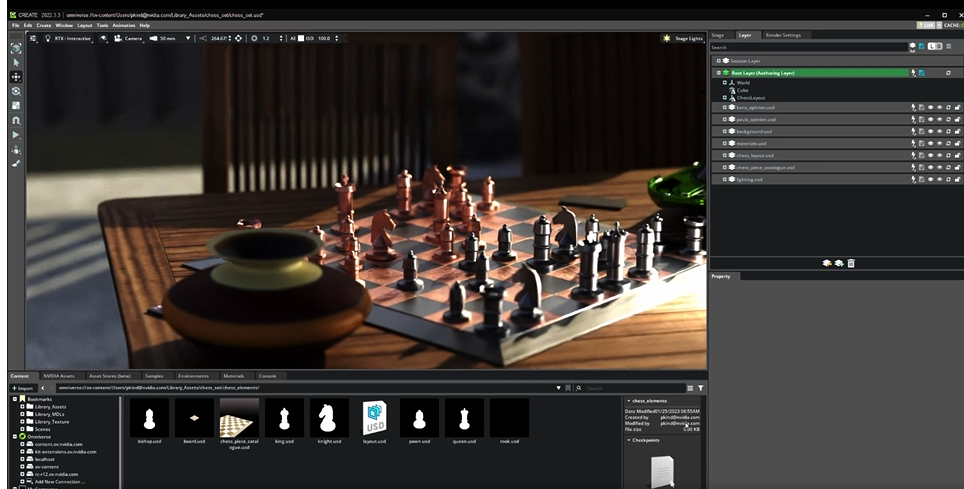
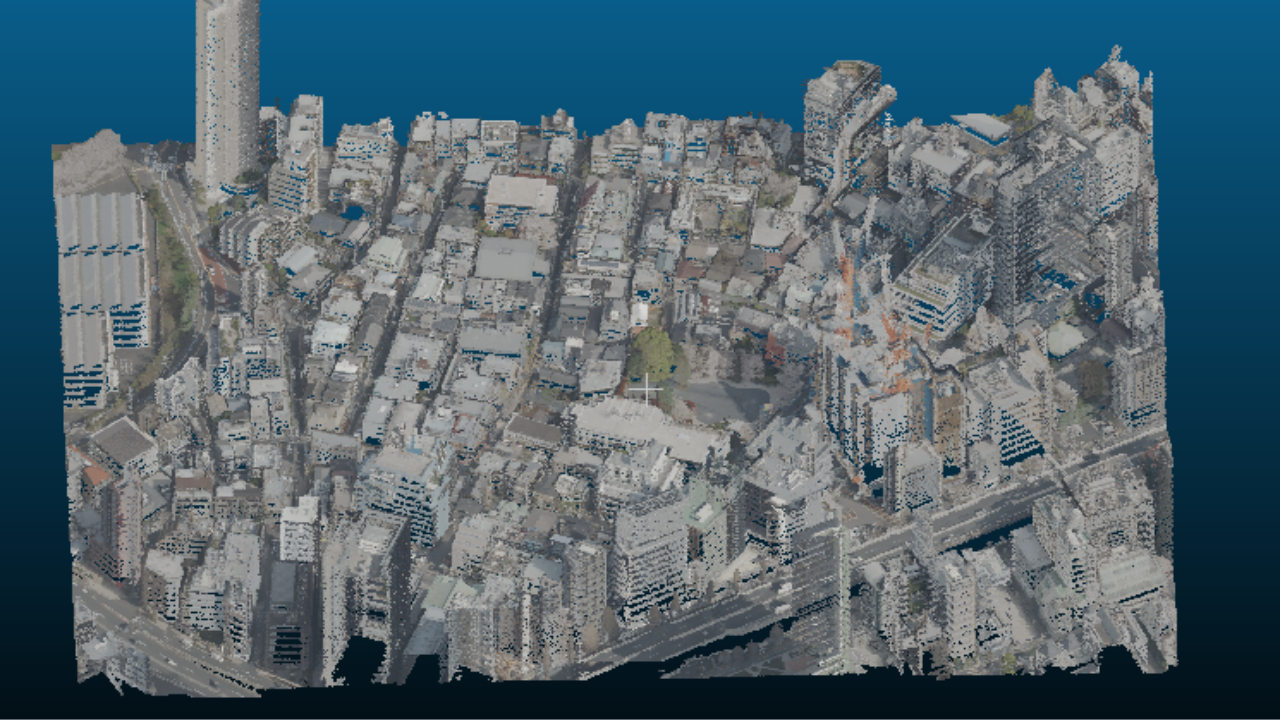
USD Composerは、OpenUSDベースの3Dシーンを構築・編集するための総合ツールです。 個別の製品デザインだけでなく、広大な工場全体、物流倉庫、あるいは都市の一部といった環境をデジタル上に再現する際に有効です。
舞台に照明を調整し、小道具を配置するように、複数のUSDアセット(素材)を組み合わせて、複雑なデジタルツインの世界をレイアウトすることができます。
3.3. 自作アプリ (Omniverse Kit)
Omniverseは既製品を使うだけではなく、Omniverse Kitという開発者向けのツールキットを利用することで、自社の特定の業務に最適化された独自の3Dアプリケーションを構築できます。
例えば、共通のRTXエンジンやPhysXエンジンを使いつつ、UIや機能を自由にカスタマイズした自社専用のOmniverseアプリを生み出すことが可能です。
4. フィジカルAIにおけるNVIDIA Omniverseの役割
これまで見てきた構造を踏まえると、フィジカルAIの開発においてNVIDIA Omniverseが果たしている役割は、単なるシミュレーターの域を超えていることがわかります。具体的には、以下の3つの核心的な価値を提供しています。
4.1. データ不足の解消
フィジカルAI、の最大の弱点は物理的な行動データの不足です。現実世界で1台のロボットが1万回の試行錯誤を行うには膨大な時間と修理費用がかかります。
Omniverseでは、この試行錯誤をデジタル上で並列化することができます。Isaac Labを用いることで、数千台の仮想ロボットが同時に異なるパターンで学習し、その成果を一つのAIモデルに集約できます。これによって、現実世界の数年分に相当する学習を数時間で終わらせれます。
4.2. 現実空間の仮想空間への反映
シミュレーションでどれほど学習しても、現実の物理法則とズレがあれば、そのAIは使い物になりません。Omniverseは、PhysXによる厳密な物理演算とRTXによる正確な光学的再現を組み合わせることで、この溝を極限まで埋めます。
鏡面反射や微妙な影を再現することで、現実世界との見た目の差を無くし、摩擦や空気抵抗、重力の変化を再現することで、物理的挙動の乖離を無くします。これによって、シミュレーション内で学習したモデルを現実世界に反映したとしても破綻することなく動作させることができます。
4.3. 安全な学習環境
現実世界では、ロボットがわざと物を壊すことや、わざと転倒するような実験は、安全性とコストの観点から困難です。しかし、AIが汎用性を獲得するためには、そうした失敗や稀にしか起きない異常事態の学習が不可欠です。
Omniverseのデジタルツイン空間は、100%安全な訓練環境であるため、火花を散らしたり、視界を極端に悪くしたり、人間が予期せぬ動きで割り込んだりといった非日常的なシナリオを無限に生成できます。
5. NVIDIA Omniverseの具体的な活用例
NVIDIA Omniverseは、すでに世界を代表する企業によって「フィジカルAI」の実装基盤として採用されています。ここでは、最新の技術動向(2026年時点)を含めた具体的な活用事例を紹介します。
5.1. BMWグループ
BMWは、工場が建設される前にデジタル上でそのすべてを構築・シミュレーションするアプローチを最も早くから推進してきました。
- 取り組み: 全世界30以上の生産拠点のデジタルツインをOmniverse上に構築し、車両データ、物流データ、ロボットの配置を統合し、リアルタイムでシミュレーションを行っています。
5.2. Amazon Robotics
Amazonの物流センターで稼働する自律走行ロボット(AMR)の進化には、Isaac Simが不可欠です。
- 取り組み: 数千台規模のロボットが稼働する巨大倉庫をOmniverseで再現し、障害物や急な人の飛び出しなど、現実では再現が難しいシナリオを数千パターン並列で学習させています。
5.3. メルセデス・ベンツ
メルセデス・ベンツは、新世代EVプラットフォーム「MMA」の導入にあたり、世界中の工場でOmniverseを全面的に活用しています。
- 取り組み: ドイツ、ハンガリー、中国などの拠点で、工場の物理的な改修を行う前にOmniverse上でデジタルツインを構築。生産ラインの配置、物流フロー、ロボットの干渉チェックを仮想空間で完遂させました。
6. まとめ
NVIDIA Omniverseによって、AIが現実世界で物理的な作業を行うための開発環境が整いました。
これまでのロボットは決まった動きを繰り返すだけでしたが、最新のAI技術と組み合わせることで、状況を判断して自律的に動くことが可能になります。Omniverseのデジタルツイン空間は、この開発を安全かつ効率的に進めるための重要な基盤です。